The time-varying system is approximated as a polynomial function of time, enabling the derivation of a time-varying control law.
Nonlinear Time-Varying Systems (NLTV): These systems are difficult to control due to their complexity. Traditional methods such as linearization scheduling transform NLTV systems into simpler LTI models by designing control laws at specific operating points.
Limitations of Traditional Methods: While linearization scheduling and gain scheduling(GN) are successful for simple NLTV systems, stability is a problem for operating points. This limitation becomes more critical when the system operates over a wide range of conditions, such as in flight vehicle guidance.
Methodology:
The first-order Taylor expansion is used to approximate the system's dynamics, allowing the design of a modified time-varying control law. This law considers time-dependent changes in the system's behavior, ensuring improved stability and performance.
Example - Inverted Pendulum: Inverted pendulum with an oscillating center of mass is a classical control problem where the pendulum's angle and angular rate must be controlled to maintain stability.
The general formation of the NLTV system can be written as
where, the function 𝑓(𝑥, 𝑡) is continuous and differentiable to variables. And the singularly perturbed system of system (1) can be written as
where, 𝜖 is the parameter of the singular perturbation, which describes the time-scale separation, such as
the ratio between the bandwidths or between the time constants of the slow and fast dynamics
To improve accuracy, the first-order Taylor expansion of A(t) and B(t)around t0is used:
Using the Taylor series approximation, the modified LTV system becomes
The stability is analyzed using the Singular Perturbation Margin (SPM) method.
It is useful for systems where time-scale separation exists, such as systems with both fast and slow dynamic components (e.g., spacecraft attitude control, flight dynamics, and robotic systems). The SPM helps in determining the stability of such systems by the interaction between the slow and fast dynamics.
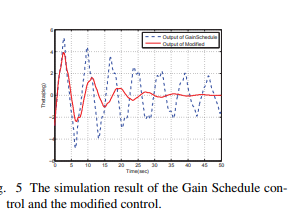
The simulation result of the system controlled by GS method (dashed line) oscillates more violently than by the new time-varying method (solid line), The new time-varying method can increase the capability of the singular perturbation of the controlled system.
0 comments:
Post a Comment